 よし待ってろ今行く。
よし待ってろ今行く。| ロボットのアルゴリズム2 ランナーのいる高さに行ける場合、そこへ向かう。 ロボットのアルゴリズム3 ランナーのいる高さに行けない場合、行ける場所から優先順位の高い位置へ向かう。 |
よし待ってろ今行く。
アルゴリズム1(地続き)でなければ、これをチェックするのですが…
そのためには「ロボットが行けると思い込む位置」を知る必要があるわけです。
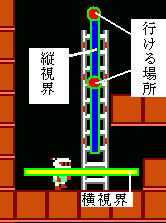
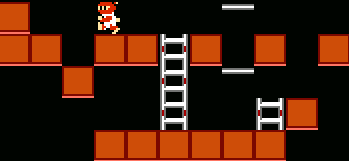
「ロボットが行ける場所」を理解するにはロボットが見ている範囲(視界)を理解する必要があります。
ロボットの視界は「ヨコ行ってタテ」で定義されます。
この横に見ていく範囲を「横視界」、
横視界内から上下に進める範囲を「縦視界」とします。
「行ける場所」は「縦視界」内の何ヶ所かになります。
 →
→
「行ける場所」をすべて洗い出したら、その中にランナーの高さと同じ場所があるかで
どっちの法則で動くか決まります。
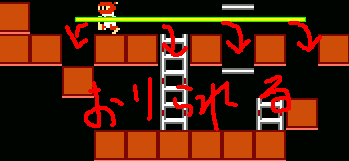
基本的には、ロボがヨコに行ける範囲が横視界になります。
例外もあるんで、画像とあわせて確認。
壁があったらそこで横視界は終了
はしごとバーは移動できる。金塊はブランクと同じ。
穴があったらそこで横視界終了
落とし穴はブランクと同じ。
横視界のまとめ
・ロボが横移動できる範囲が横視界。
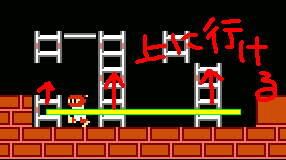
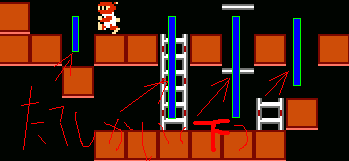
横視界内にはしごがあった場合、そこから上に縦視界がのびます。
横視界内に下に行ける要素(落下、バーから手を放せる、はしごを下りられる)があった場合、
そこから下に縦視界がのびます。
まず上から。
 ここから考えて、
ここから考えて、
 横視界内の上に行ける箇所をチェック!(はしごしかないね)
横視界内の上に行ける箇所をチェック!(はしごしかないね)
 上方向の縦視界は一段上がったところからはしごの上までできる。
上方向の縦視界は一段上がったところからはしごの上までできる。
上がわかったら次は下。
 ここから考えて、
ここから考えて、
 横視界内の降りられる箇所をチェック!
横視界内の降りられる箇所をチェック!
 そこからレンガかコンクリまで行ったら縦視界(下)完成。
そこからレンガかコンクリまで行ったら縦視界(下)完成。
(具体例)
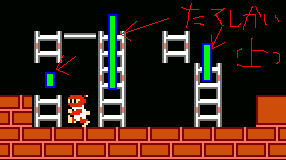
 実例。左上のロボにとっての縦視界は…
実例。左上のロボにとっての縦視界は…
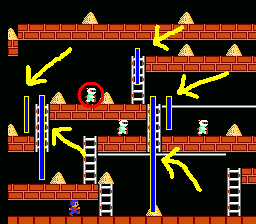 この5本。
この5本。